Alimentación dos motores e servos e Arduíno
Se fedellando co teu Arduíno tiveches algunha vez a tentación de conectar directamente un servo á placa, mellor non o fagas.

Por que?
Cando un servo ou motor comeza a moverse necesita máis intensidade de corrente que cando xa está en marcha, o que provoca unha caída de tensión na placa no caso de estar alimentado a través dela.
Se só imos conectar un pequeno e único motor ou microservo e non lles imos dar moita tralla a alimentación dos mesmos pódese realizar a través da placa Arduíno. Porén, se vas utilizar varios motores e servos de maior consumo cómpre utilizar unha alimentación externa para os motores, xa que se non pode suceder que:
- o alto consumo de corrente dos motores faga que o programa non funcione correctamente ou incluso pode facer que se reinicie o Arduíno.
- pódese danar a placa Arduíno polas correntes de retorno que se poden producir.

Posibles solucións
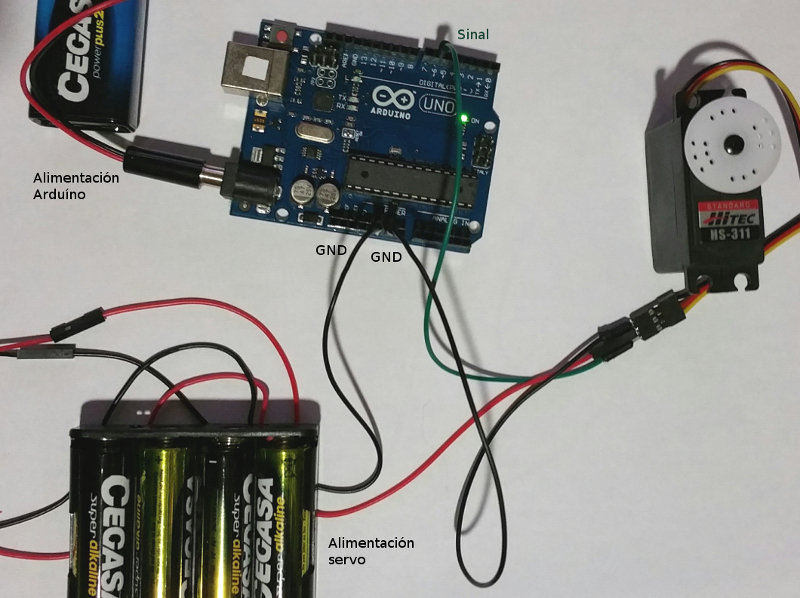
Alimentación externa
Nesta imaxe podes ver como se faría directamente. Lémbrate de xuntar a masas do alimentador externo e a do Arduíno.
Aquí conectamos varios servos:
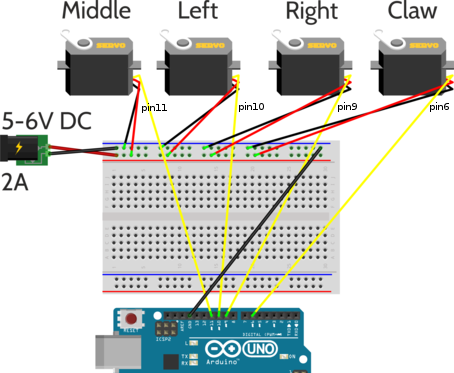
No caso de usar un controlador de motores ou un controlador de servos utiliza os pins axeitados para a alimentación externa consultando as especificacións dos controladores.
Condensador
Se non queres utilizar alimentación externa, outra opción é conectar un condensador de 470 μF ou maior en paralelo cos pins de alimentación do servo. Desta maneira o servo cada vez que arranca utiliza a carga almacenada no condensador e non demanda tanto da placa, evitando que se reinicie. Ollo coa polaridade do condensador electrolítico: a pata grande sempre ao positivo.
Isto non vai ser suficiente se utilizas varios servos simultaneamente, pois a demanda de corrente da placa nese caso será moi elevada, e será mellor utilizar alimentación externa.